Results
One iPhone recording.
One iPhone recording.
Robot picks up the mug.
Real iPhone 15 Pro recording → HaMeR hand extraction → trajectory retargeting → Franka Panda grasps and lifts 18.1cm.
Real recording → robot grasp
Hand trajectory drives approach. Expert funnel handles final contact. 18.1cm clean lift.
Validation replay
Same recording, different controller. +17.2cm lift confirms usable grasp signals.
93.7%
hand detection
18.1cm
clean lift
0
collisions
1
iPhone recording
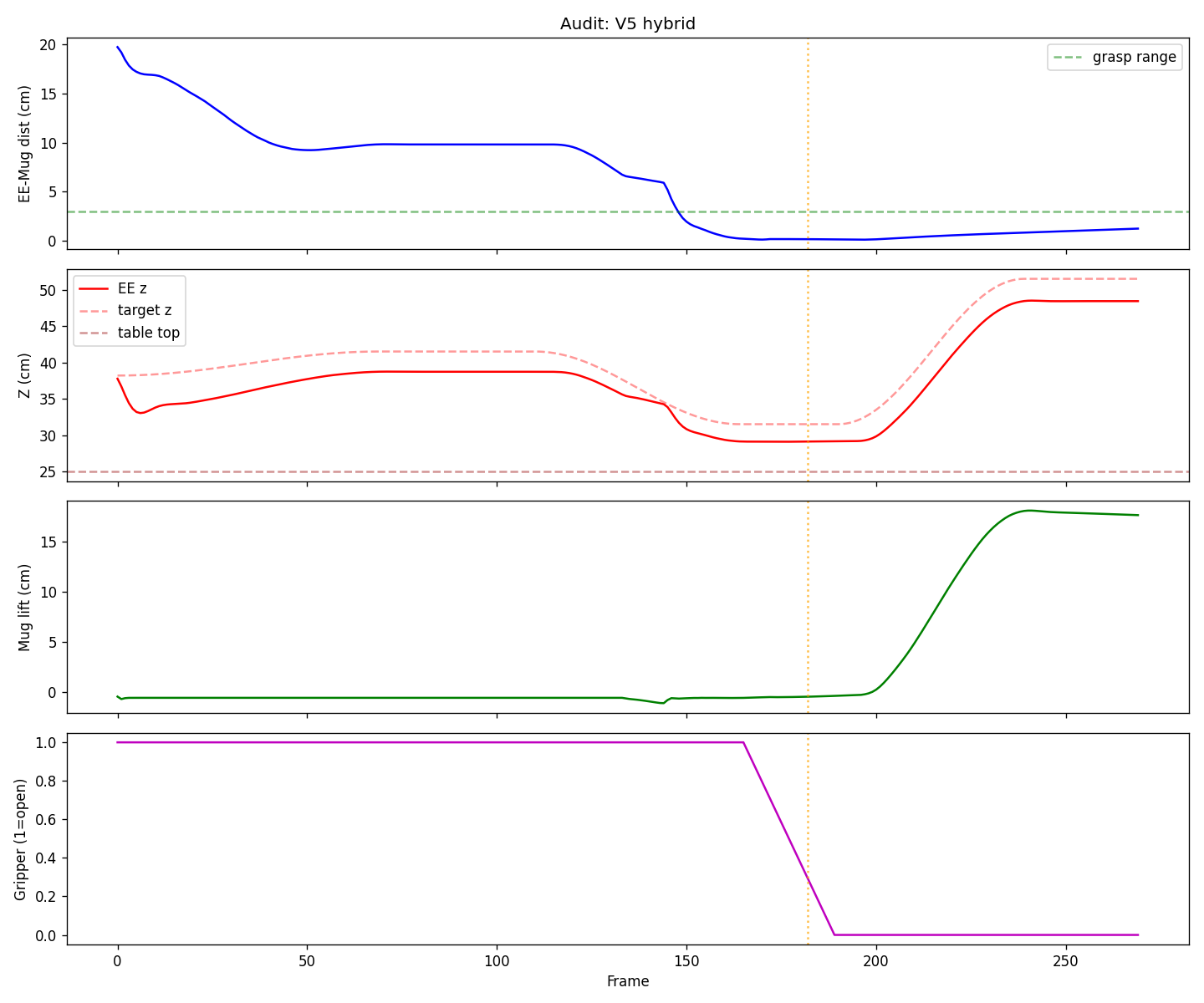
End-effector distance, height, mug lift, and gripper state over 270 frames
18.1cm
max lift
0.13cm
min distance
0
table collisions
PASS
automated verdict
V1
Wild
V2
Tipped
V3
4cm miss
V4
4cm+ off
V5
18.1cm lift ✓
5 iterations in 1 day · Feb 28 2026 · GroundingDINO + HaMeR on Modal · MuJoCo Panda